Physics Overview
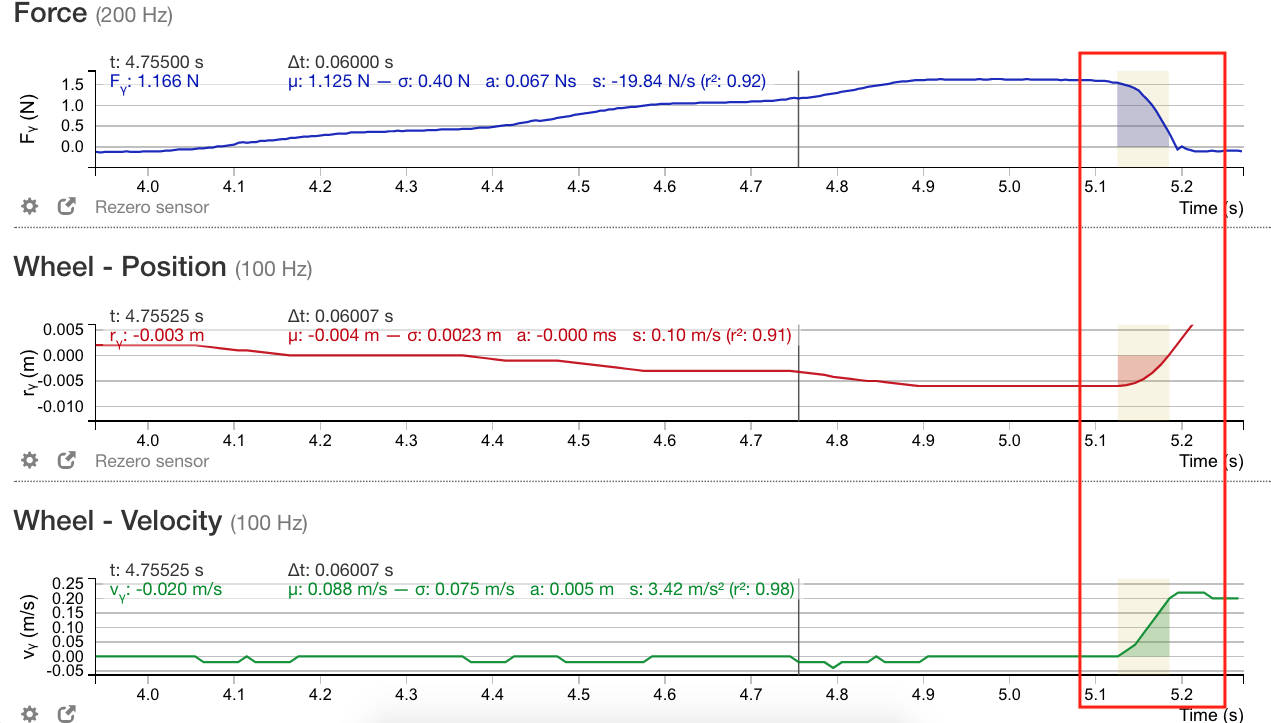
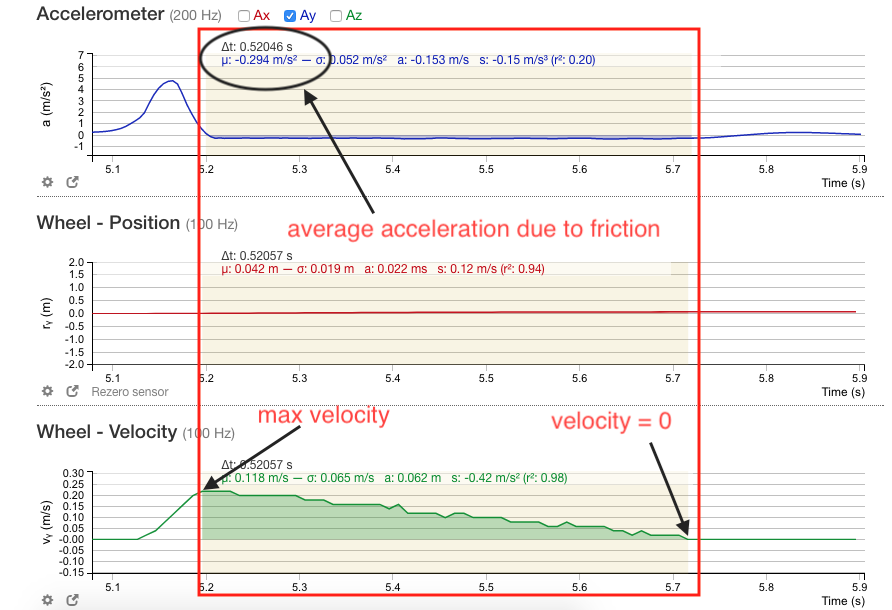
Consider an ideal spring which has the properties that it obeys Hooke's Law (see below) and is massless, as shown in Figure 1. A block of mass \(m\) is attached to the spring and the mass-spring system rests on the table with the spring at its equilibrium length. Consider compressing the spring by pushing on the mass, and the spring is compressed by a distance \(\Delta x\) as shown in Figure 2. Let us imagine that the there is no friction between the block and the surface of the table. You will notice that if you hold the system stationary at this position, then you will need to supply a force to prevent the spring from pushing the attached mass out. If the system is stationary as shown in Figure 2 then the force you supply will be exactly matched by the force that the spring exerts.
It also turns out that (for an ideal spring) the force that the spring exerts is proportional to the displacement of the spring away from its equilibrium length. Thus, this force can be written as,
\[ \vec{F}_s \propto \Delta \vec{x}. \label{eq:fsprop}\]
It turns out that the spring force is directed opposite to the displacement - hence you can see in Figure 2 the spring force is directed to the right when the displacement of the spring away from equilibrium is a vector pointing to the left. With this knowledge we can write Eq. \eqref{eq:fsprop} as an equality by inserting a constant of proportionality \(k\):
\[ \vec{F}_s = - k \Delta \vec{x}, \label{eq:hooke_s_law} \]
where \(k\) is called the spring constant. The stiffer the spring the larger the value of \(k\). Eq. \eqref{eq:hooke_s_law} is called Hooke's Law.
It can be readily seen that the relationship between the spring force and the displacement of the spring away from equilibrium is a linear relationship. You will be verifying this relationship in your lab today.
Conservation of Mechanical Energy
When you compressed the mass-spring system to the position shown in Figure 2 you did work on the system. Assuming that the system is stationary at this position, then the work that was done by you goes into increasing the potential energy of the mass-spring system. Now, the potential energy of the mass is unaltered, as it has not moved in the vertical direction, hence all the potential energy of the mass-spring system is given by the potential energy of the spring. Thus, when you did work to compress the spring, you transfered energy to the system and that energy is stored as potential energy in the compressed spring. The moment you let go of the mass, the system will move and it will convert this potential energy to kinetic energy of the mass.
When the system is dynamic, i.e., when the mass moves, in the absence of friction and other dissipative effects, the total mechanical energy of the system will remain conserved. In other words, for the mass-spring system the sum of the potential energy of the spring and the kinetic energy of the mass, at any given instant of time, will be constant. Therefore we can write,
\[ U + K = \textrm{const} \implies \frac{1}{2}kx^2 + \frac{1}{2}mv^2 = \textrm{const}. \label{eq:tot_energy} \]
Where we have used the definition of the potential energy stored in the spring, as well as the kinetic energy of the mass. In Eq. \eqref{eq:tot_energy} \(x\) represents displacement of the spring away from its equilibrium position, presumed to be \(0\), as shown in Figure 2. Therefore when \(v=0\) the kinetic energy is zero and the mass-spring system only has potential energy, and when the spring is at its equilibrium length, \(x=0\) and hence all of the energy of the system will be the kinetic energy of the mass. Thus, as the system moves energy will get converted from potential energy to kinetic energy and vice versa, however if you sum up the potential and kinetic energies at any given instant of time, you will find that the total mechanical energy is constant for the mass-spring system. You will be verifying Eq. \eqref{eq:tot_energy} in the lab today.
Work-kinetic energy theorem
Now consider the motion from the point of view of the block of mass \(m\) as shown in Figure 2. In the absence of friction and any dissipative effects the net force on the mass at any given instant is simply the spring force, and the latter is proportional to the displacement of the spring away from equilibrium. Hence we can immediately conclude that the net force on the mass is greatest in magnitude when the spring is displaced maximally from its equilibrium, and zero when the spring is momentarily at its equilibrium position during the ensuing motion of the mass-spring system. Therefore we can write that the change in kinetic energy of the mass must be equal to the work done on it by the net force, i.e., the spring force.
\[ W_\textrm{net} = \Delta K \implies \int_{x_1}^{x_2} \vec{F}_s \cdot \vec{dl} = K_2 - K_1, \label{eq:work_energy} \]
where, \(K_1\) and \(K_2\) are the kinetic energies of the mass at positions \(x_1\) and \(x_2\), respectively. You will be verifying Eq. \eqref{eq:work_energy} in the lab today.
If you would like to get a quick video refresher about a mass-spring system, see the following video.